THOMAS DENG
Robotics • Autonomous Vehicles • Machine Learning Research
About Me
Hello! I am a junior at Stanford studying Computer Science. I work on robotics, autonomous vehicles, and machine learning at the Interactive Perception and Robot Learning Lab as a part of the Stanford AI Lab, and also at the Stanford Robotics Center. I build and research systems that combine learning-based architectures with classical robotics, focusing on understanding and improving VLA models and learning-based perception.
Research and Publications

GRPO VLA Fine-tuning
Exploring stability + performance of group advantage RL for VLA models. Implemented new infrastructure for robotics RL environments and developed novel methods for state of the art VLA performance on LIBERO task suites.
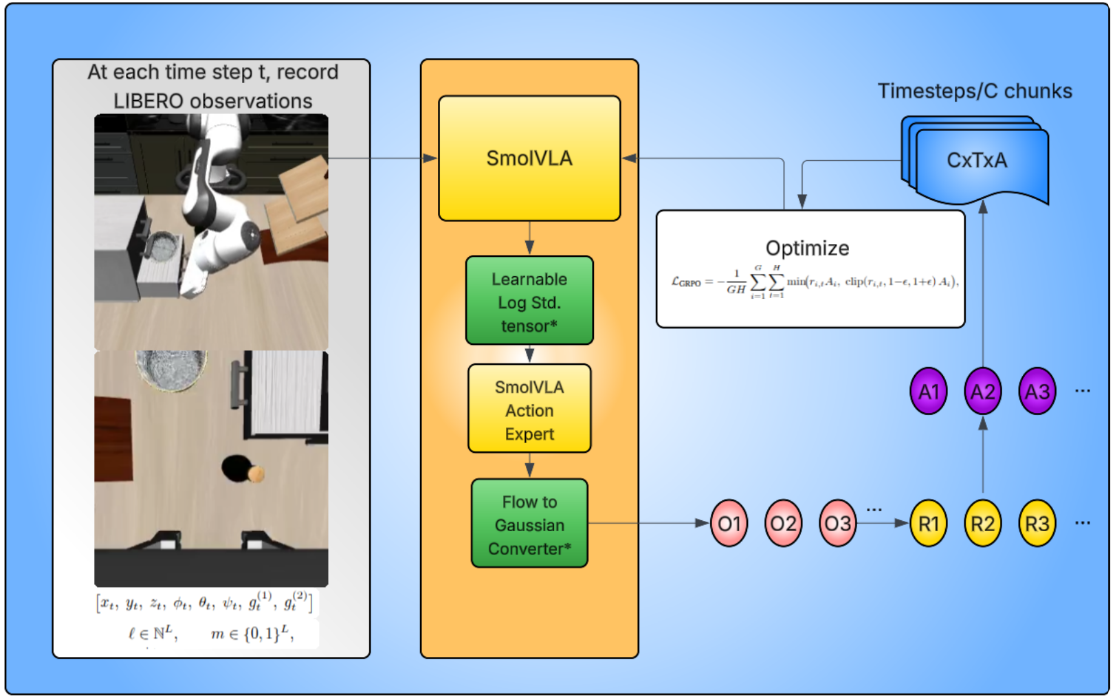
Safe Robot Steering
Analyzing GRPO RL fine-tuning effects on SmolVLA across LIBERO tasks. Implemented mechanistic interpretability on SmolVLA model.
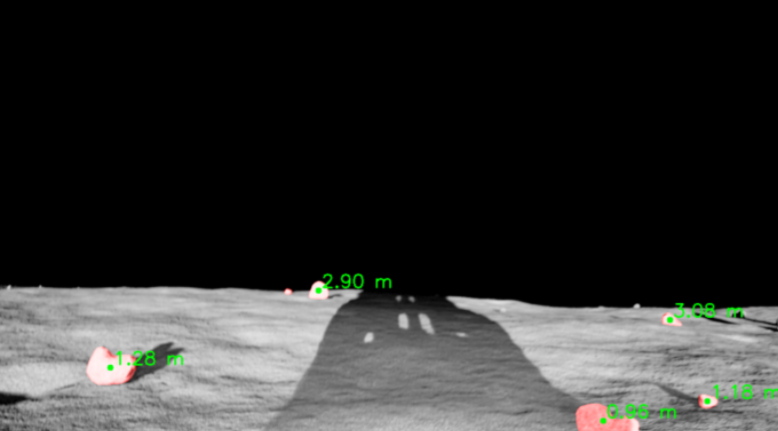
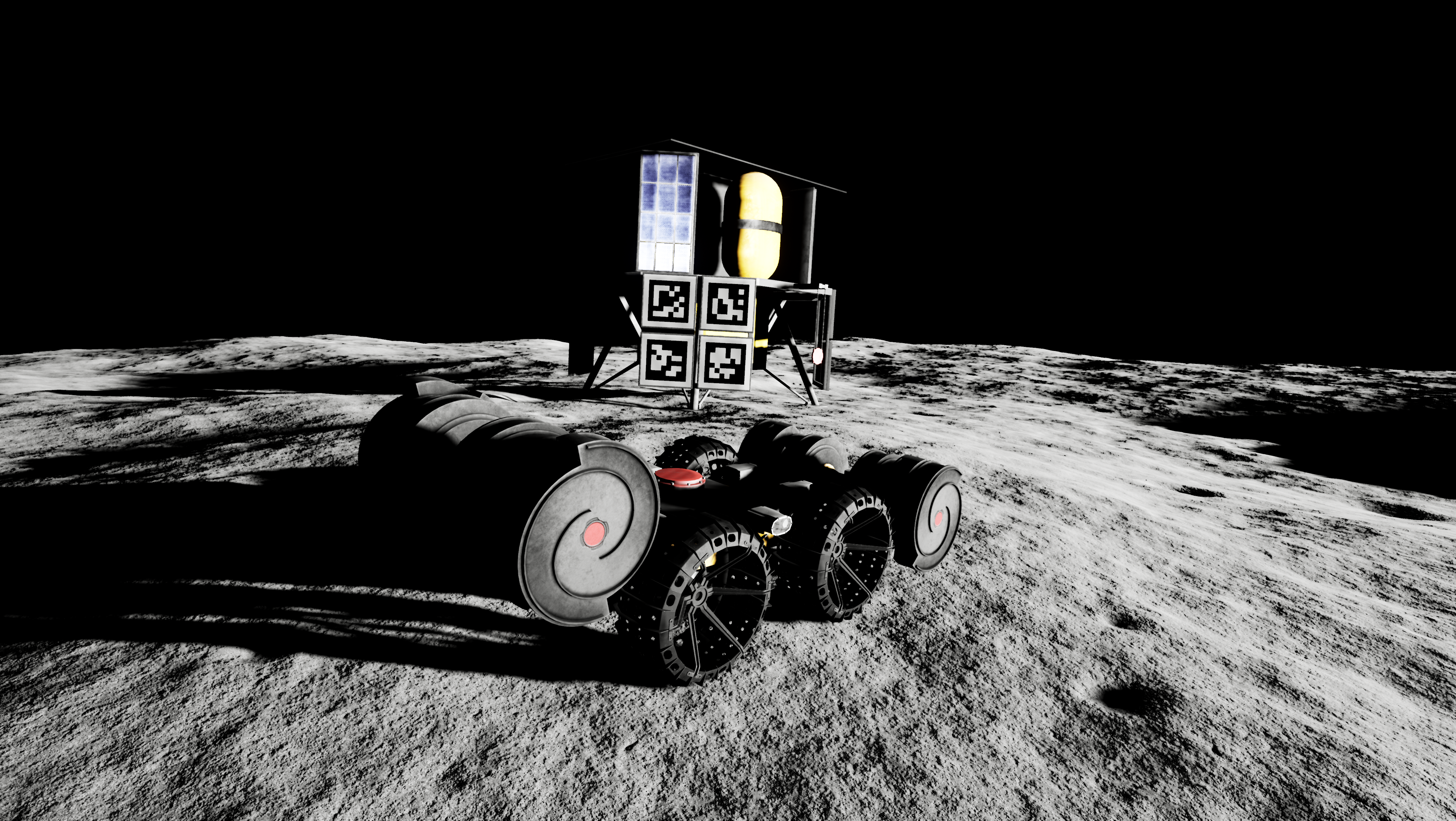
NASA Lunar Autonomy Challenge (Published in ION)
AI-driven lunar rover navigation pipeline for the NASA Lunar Autonomy Challenge. Integrated LangSAM for rock segmentation, Depth Anything V2 for depth estimation, stereo disparity for geometry, and arc-based Dubins trajectories for safe local planning and waypoint following within NAVLab’s full autonomy stack.
Stanford NAVLab Autonomous Vehicles Research
Path-planning and simulation research using Unreal Engine's AirSim and Carla.
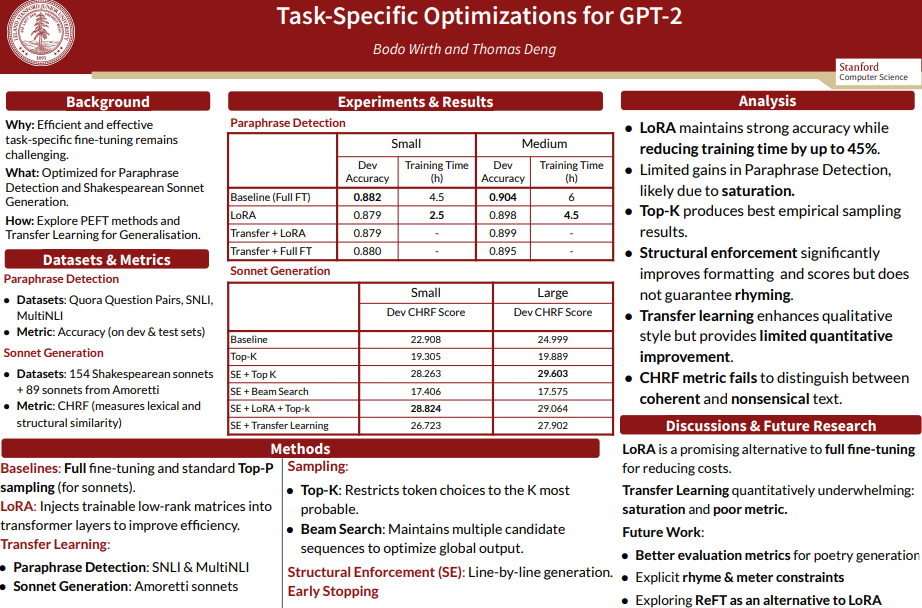
Task-Specific Optimizations for GPT-2 (Stanford CS 224N Final Project 2025)
. Investigated parameter efficient fine-tuning via Low-Rank Adaptation (LoRA) on GPT-2, to examine whether it can reduce training costs without sacrificing accuracy.
Fun Projects
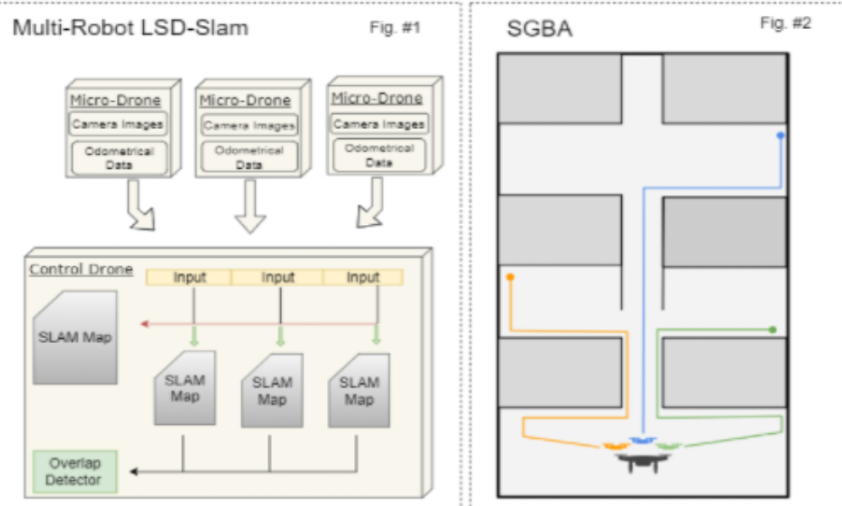
MIT THINK Finalist Project (2022)
Deployment of a Collectively Optimized Swarm of Autonomous Micro UAVs for Accurate 3D Reconstruction of Destroyed Buildings During Disaster Recovery



The Akeer Foundation
Akeer Foundation: My friends and I are founding a K–12 school in South Sudan. I believe that education and opportunity are inalienable rights, and every step toward universal access sets a precedent of hope for the hundreds of millions who never had these liberties.
Personal
I enjoy playing basketball and soccer. On the road to win an IM championship. As a Philly native, I am a lifelong 76ers fan, unfortunately... Also, current Warehaus dorm ping pong champion!
I have also dabbled in music production! Here is a track I made: